Amazon Robotics
Software Development Engineer I | Aug '22 - Jan '23
The main project I worked on was developing a metrics pipeline and its surrounding infrastructure which was deployed to 100s of production robotic workcells.
I gained experience with developing resilient code at scale, and mainly worked with AWS (IoT, Lambda, Cloudwatch, Kinesis, CDK).
Through contributing to team code reviews and supporting customers with on-call responsibilities I gained development experience.
Visiting a production Fufillment Center allowed me to learn about the entire Amazon delivery network, and allowed me to see the robots I was working on in real life.
Software Development Engineering Co-op | Jan '21 - Jun '21
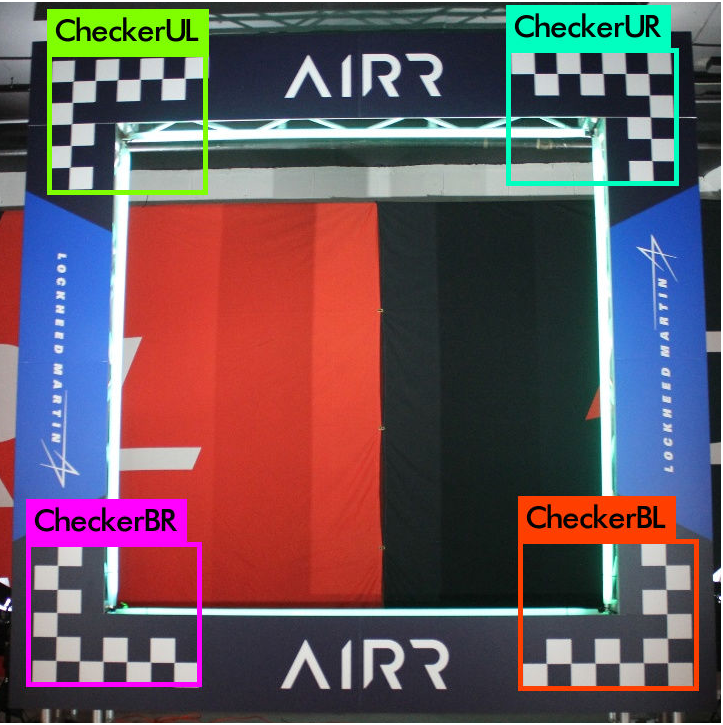
Developed a package singulation detection solution, using Tensorflow to classify images of packages.
Fully integrated the project with AWS (Sagemaker, GreengrassV2, Lambda, Cloudwatch).